Junfei Zhan
Open Menu
Close Menu
首页
经历
研究
项目
写作样本
中文 (简体)
English
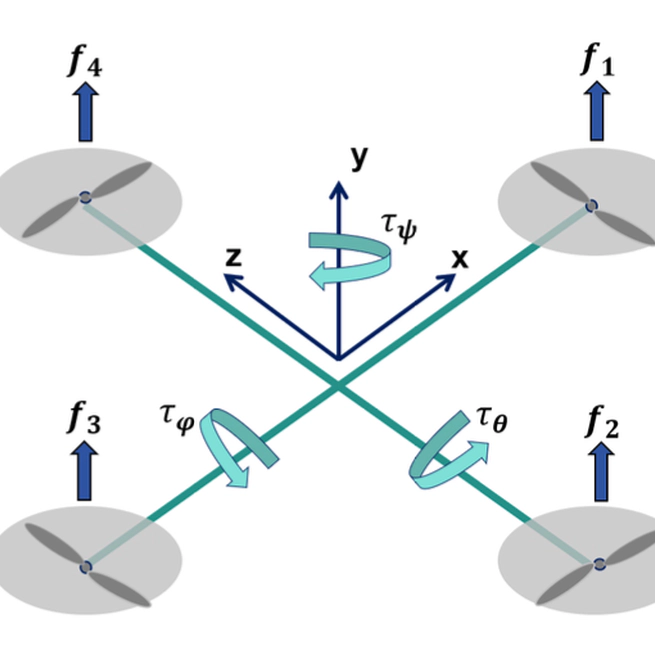
UAV
RL-Enhanced Disturbance-Aware MPC for Robust UAV Trajectory Tracking
开发了一种混合控制框架,将强化学习和滑模观测器集成到 MPC 中,实现扰动感知的 UAV 轨迹跟踪。
5月 7, 2025