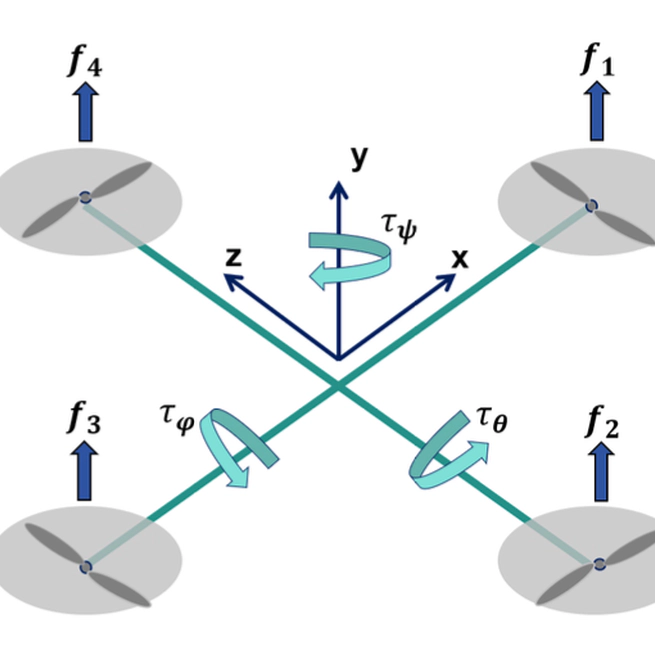
RL-Enhanced Disturbance-Aware MPC for Robust UAV Trajectory Tracking
开发了一种混合控制框架,将强化学习和滑模观测器集成到 MPC 中,实现扰动感知的 UAV 轨迹跟踪。
5月 7, 2025
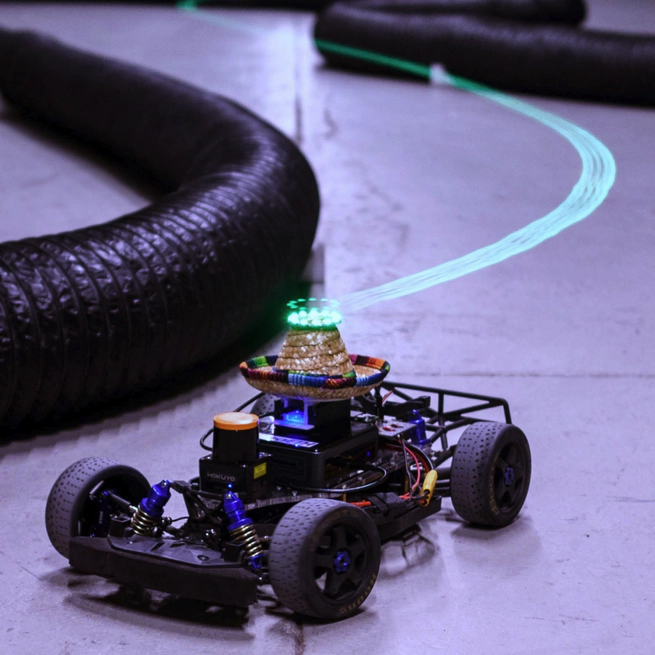
MPPI with Control Barrier Functions for F1/10:真实世界不确定性下的鲁棒安全控制
本项目在 F1/10 自主赛车平台上实现了 Shield-MPPI,这是一种将 Control Barrier Functions (CBFs) 与 Model Predictive Path Integral (MPPI) 控制相结合的新方法,旨在实现真实世界不确定性条件下的鲁棒安全导航。
5月 7, 2025
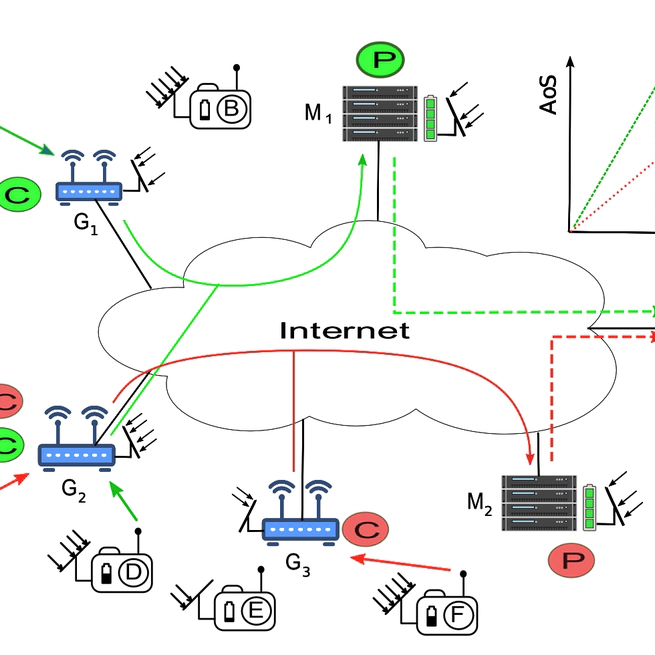
Minimizing Maximum Age of Service in Virtualized Green IoT Networks
开发了优化与控制策略,以降低可再生能源驱动的 IoT 网络中的服务延迟
12月 7, 2024