Bridging Optimal Control And Reinforcement Learning For Node-Level Vaccine Allocation: A Regime-Based Comparative Analysis
硕士毕业论文。一个面向异质接触网络的可扩展逐人疫苗分配框架,在随机 SEPAILHRVD 模拟器上对比「群体级最优控制 + 度数启发式」与端到端强化学习。
Apr 23, 2026
Bridging Optimal Control And Reinforcement Learning For Node-Level Vaccine Allocation: A Regime-Based Comparative Analysis
Master's thesis. A scalable framework for per-individual vaccine allocation on heterogeneous contact networks, comparing group-level optimal control with hub-aware heuristics against end-to-end reinforcement learning on a stochastic SEPAILHRVD simulator.
Apr 23, 2026
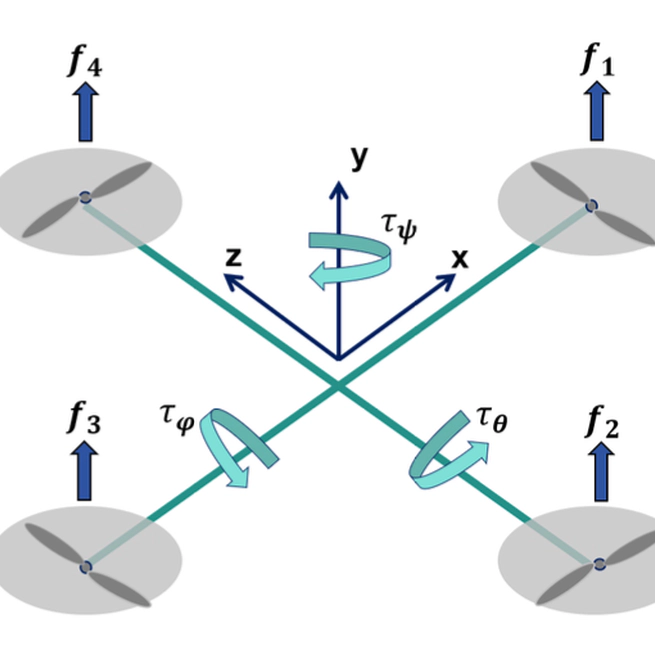
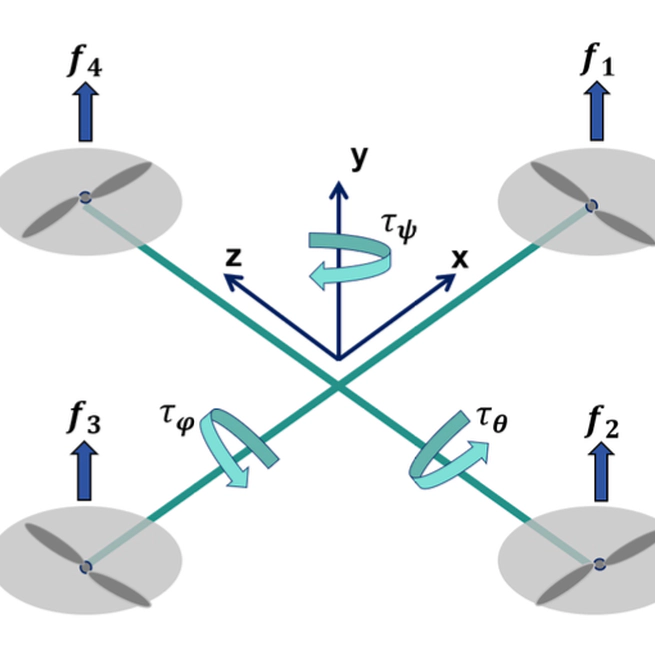
RL-Enhanced Disturbance-Aware MPC for Robust UAV Trajectory Tracking
开发了一种混合控制框架,将强化学习和滑模观测器集成到 MPC 中,实现扰动感知的 UAV 轨迹跟踪。
May 7, 2025
RL-Enhanced Disturbance-Aware MPC for Robust UAV Trajectory Tracking
Developed a hybrid control framework integrating reinforcement learning and sliding mode observer into MPC for disturbance-aware UAV tracking.
May 7, 2025
基于 Reinforcement Learning 的接触网络随机疫苗分配策略
将确定性最优控制与 Reinforcement Learning 相结合,开发了个体级接触网络上的随机疫苗分配策略,实现了鲁棒的疫情响应建模。
Mar 17, 2025
RL for Stochastic Vaccine Allocation on Contact Networks
Bridged deterministic optimal control and reinforcement learning to develop a stochastic vaccine allocation strategy on individual-level contact networks, enabling robust pandemic response modeling.
Mar 17, 2025