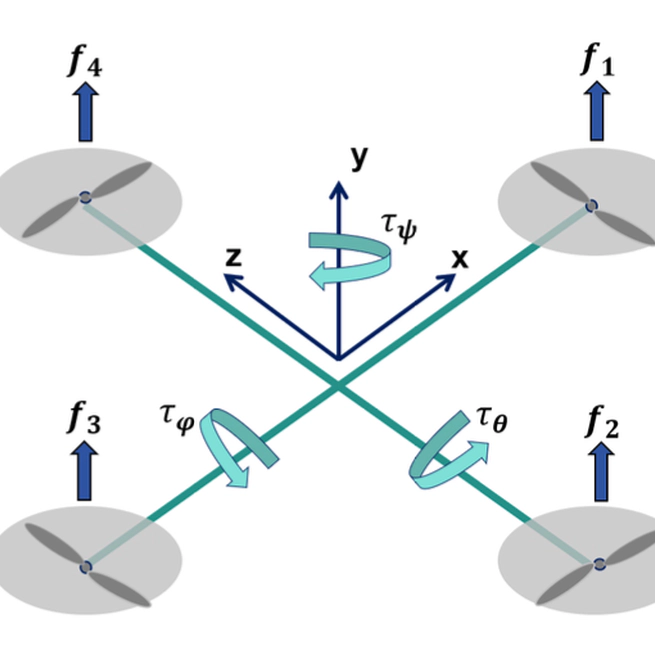
RL-Enhanced Disturbance-Aware MPC for Robust UAV Trajectory Tracking
开发了一种混合控制框架,将强化学习和滑模观测器集成到 MPC 中,实现扰动感知的 UAV 轨迹跟踪。
May 7, 2025
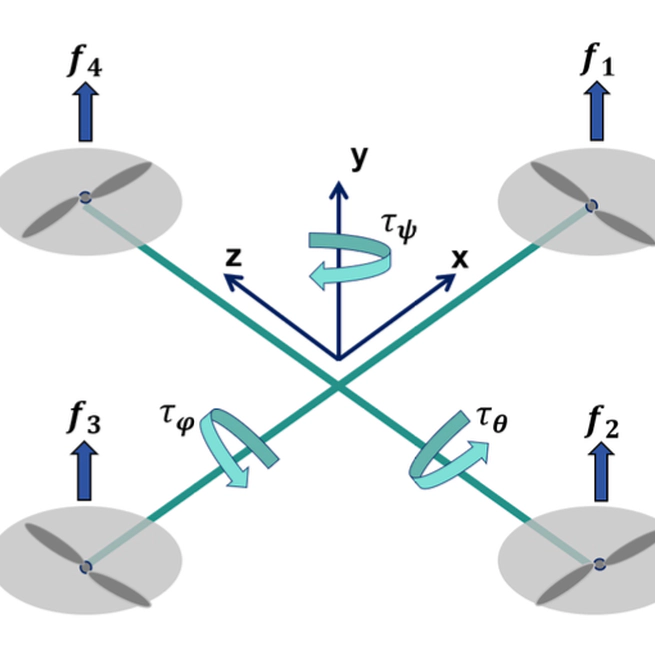
RL-Enhanced Disturbance-Aware MPC for Robust UAV Trajectory Tracking
Developed a hybrid control framework integrating reinforcement learning and sliding mode observer into MPC for disturbance-aware UAV tracking.
May 7, 2025
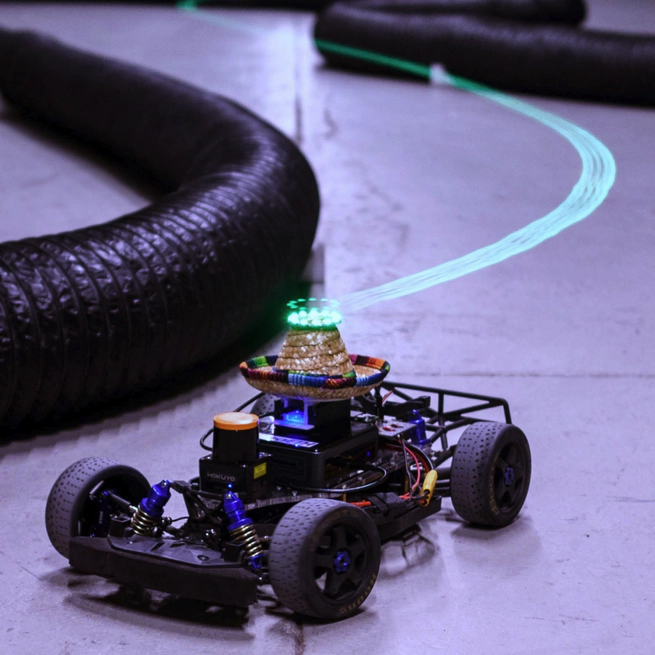
MPPI with Control Barrier Functions for F1/10:真实世界不确定性下的鲁棒安全控制
本项目在 F1/10 自主赛车平台上实现了 Shield-MPPI,这是一种将 Control Barrier Functions (CBFs) 与 Model Predictive Path Integral (MPPI) 控制相结合的新方法,旨在实现真实世界不确定性条件下的鲁棒安全导航。
May 7, 2025
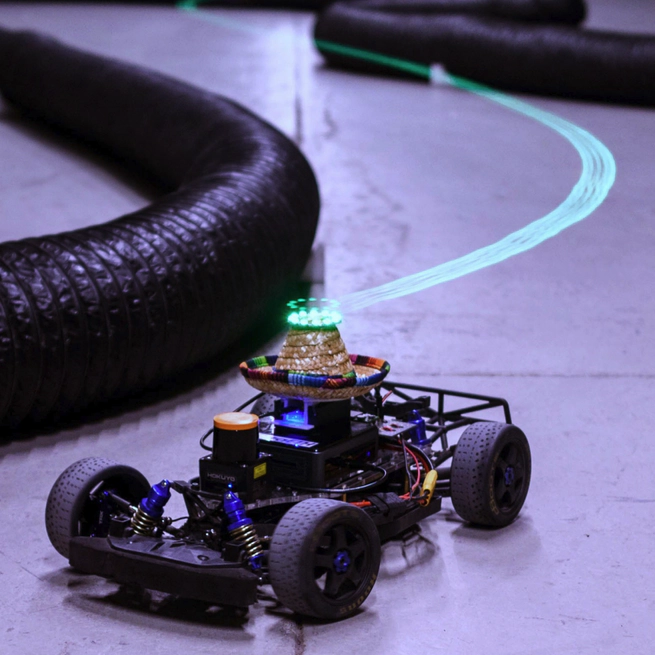
MPPI with Control Barrier Functions for F1/10: Robust Safety Under Real-World Uncertainty
This project implements Shield-MPPI, a novel integration of Control Barrier Functions (CBFs) with Model Predictive Path Integral (MPPI) control, on the F1/10 autonomous racing platform to achieve robust, safe navigation under real-world uncertainty.
May 7, 2025
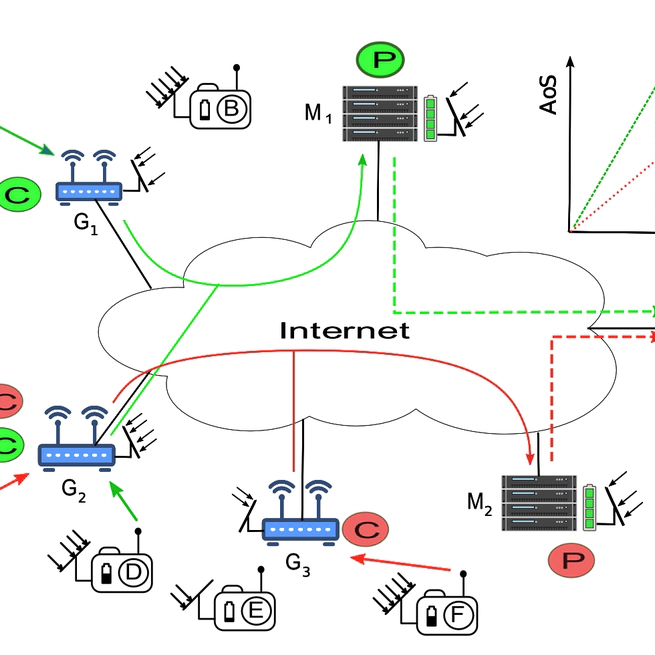
Minimizing Maximum Age of Service in Virtualized Green IoT Networks
开发了优化与控制策略,以降低可再生能源驱动的 IoT 网络中的服务延迟
Dec 7, 2024
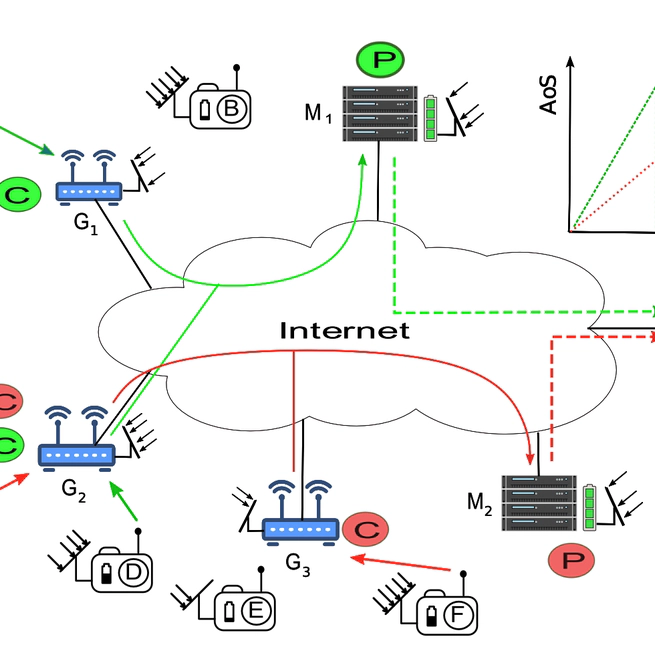
Minimizing Maximum Age of Service in Virtualized Green IoT Networks
Developed optimization and control strategies to reduce service latency in renewable-powered IoT networks
Dec 7, 2024