报告 - MPPI with Control Barrier Functions for F1/10: Robust Safety Under Real-World Uncertainty
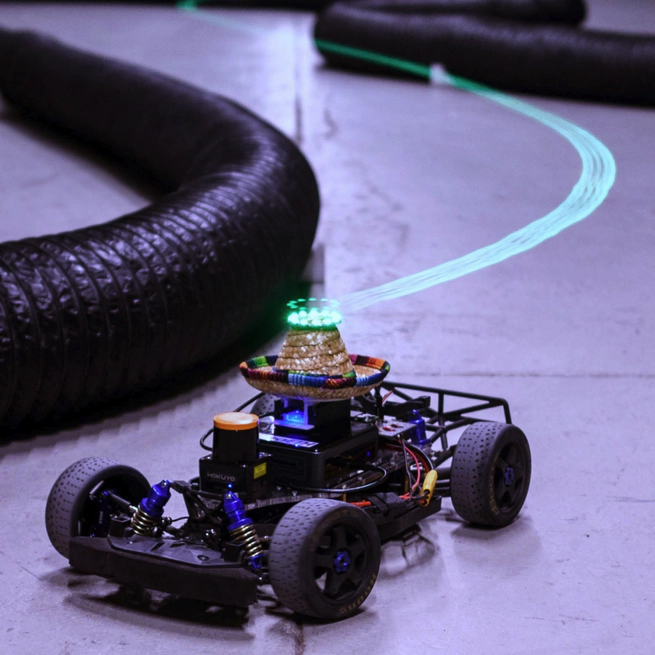
Shield-MPPI 将基于采样的规划与通过 Control Barrier Functions (CBFs) 实现的安全保障相结合,在 F1TENTH 平台上实现了实时、鲁棒的自主赛车轨迹生成。该系统集成了基于 EKF 的跟踪、Spline 规避规划和模块化 ROS2 架构,以确保动态赛车条件下的安全性。
May 17, 2025
Report - MPPI with Control Barrier Functions for F1/10: Robust Safety Under Real-World Uncertainty
Shield-MPPI combines sampling-based planning and safety enforcement through Control Barrier Functions (CBFs), enabling real-time, robust trajectory generation for autonomous racing on the F1TENTH platform. The system integrates EKF-based tracking, spline evasion planning, and a modular ROS2 architecture to ensure safety under dynamic racing conditions.
May 17, 2025
MPPI with Control Barrier Functions for F1/10:真实世界不确定性下的鲁棒安全控制
本项目在 F1/10 自主赛车平台上实现了 Shield-MPPI,这是一种将 Control Barrier Functions (CBFs) 与 Model Predictive Path Integral (MPPI) 控制相结合的新方法,旨在实现真实世界不确定性条件下的鲁棒安全导航。
May 7, 2025
MPPI with Control Barrier Functions for F1/10: Robust Safety Under Real-World Uncertainty
This project implements Shield-MPPI, a novel integration of Control Barrier Functions (CBFs) with Model Predictive Path Integral (MPPI) control, on the F1/10 autonomous racing platform to achieve robust, safe navigation under real-world uncertainty.
May 7, 2025